
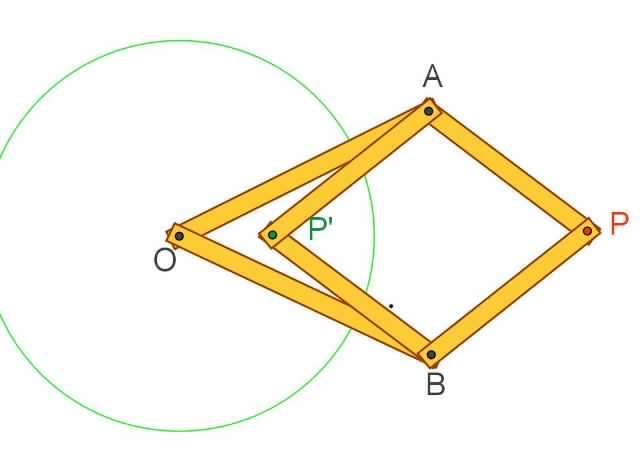
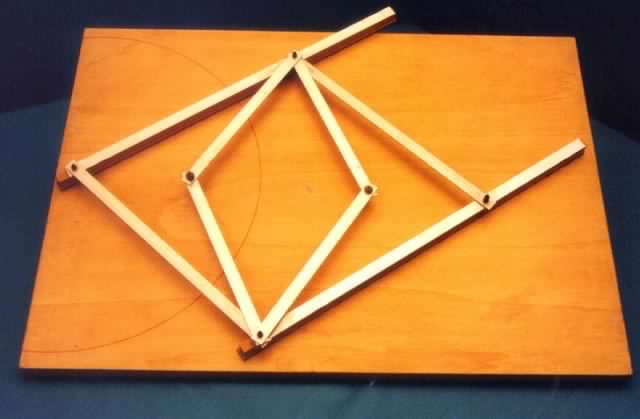
Il meccanismo è formato da 6 aste incernierate agli estremi e imperniate al piano in O. E' OA=OB= a, AP'=AP=PB=BP'= b. Durante il movimento i punti O,P' e P si mantengono allineati sulla bisettrice dell'angolo BOA. Si tracci la circonferenza di centro A e raggio b Applicando il teorema delle secanti alle secanti OP e OA si ha :
OP*OP'=(OA+b)(OA-b)=a2 - b2 . I punti P e P' si corrispondono quindi nella inversione circolare avente come circonferenza base quella di centro O e raggio √(a2-b2).
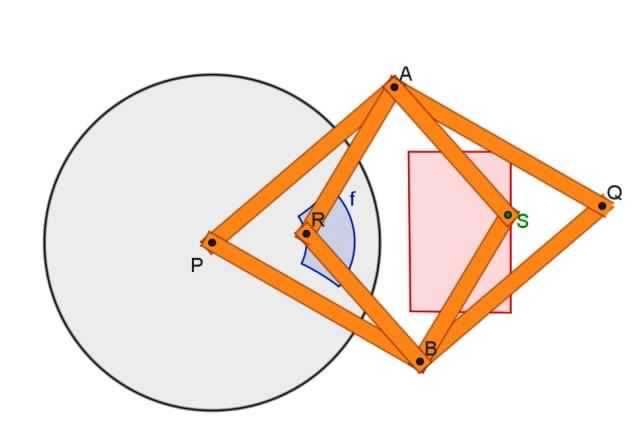
La macchina è costituita da una coppia di rombi articolati APBQ ( di lato a) e ARBS (di lato b), aventi due vertici opposti (A e B) in comune (a>b). Fissando P al piano del modello, i punti R ed S si corrispondono nell’ inversione circolare di polo P e raggio √(a2 -b2) . Fissando R al piano del modello, i punti P e Q si corrispondono nella inversione circolare di polo R e raggio immaginario √(b2-a2) (antiinversione)
Genesi tridimensionale

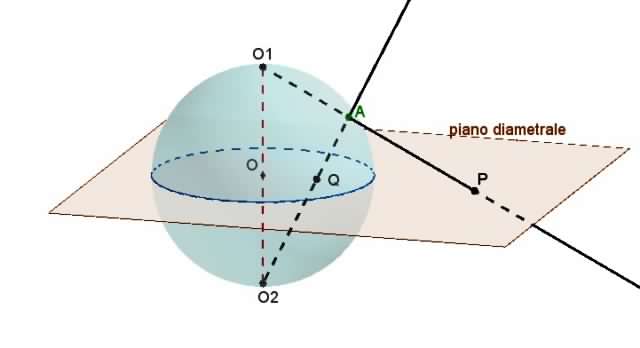
Il modello illustra la genesi spaziale tridimensionale della inversione circolare. Proiettando da due poli opposti O1 e O2 di una sfera S (di centro O e raggio r) uno stesso punto A della sfera su un piano π perpendicolare al diametro per O1 e O2 (ad esempio il piano diametrale, come nel modello) si ottengono i punti P e Q (proiezioni stereografiche di A su π, rispettivamente da O1 e O2 ). P e Q si corrispondono nella inversione circolare rispetto alla circonferenza γ intersezione di S con π .
")
")