 |
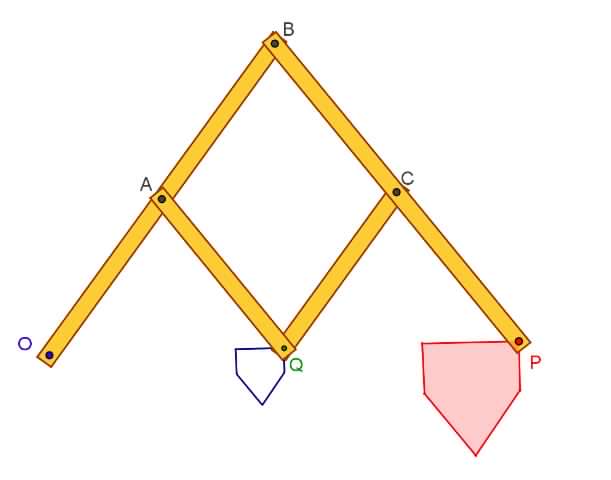 |
Il sistema articolato è costituito da quattro aste rigide incernierate nei punti A,B,C e Q scelti in modo da formare un rombo. Il punto O è fissato al piano su cui il meccanismo si muove. Il punto P sull’asta BC è scelto in modo tale che risulti: PC=BC
I punti O, D e Q rimangono allineati durante la deformazione del sistema. Quindi Q e P si corrispondono in una omotetia di centro O.
Considerando P come corrispondente di Q avremo il rapporto di omotetia k=OP/OD=2.
Se, invece, si considera q corrispondente di P, avremo come rapporto di omotetia 1/2
Zone occupate dal puntatore e dal tracciatore
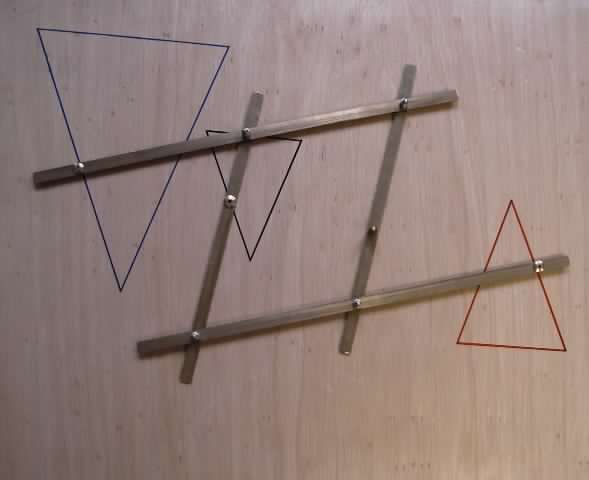
secondo modello
 |
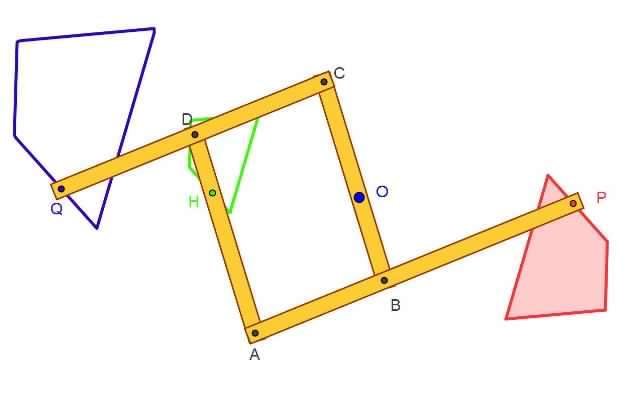 |
Omotetia: pantografo di Scheiner
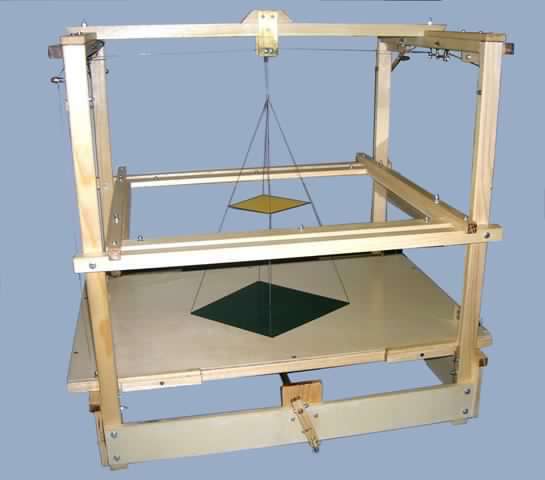
Genesi tridimensionale della omotetia
 |
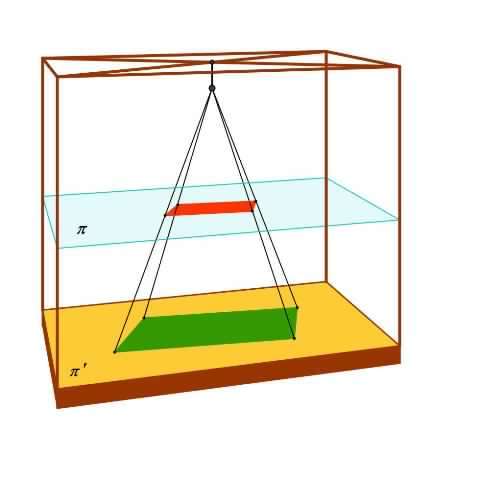 |
Nel modello fisico, le lastre rettangolari Π (trasparente) e Π’ rappresentano due piani paralleli.
La figura appartenente a Π’ si può considerare come ombra di quella giacente su Π, ottenuta per effetto di raggi luminosi (materializzati nel modello mediante fili tesi) provenienti da una sorgente puntiforme posta in O.
In generale, i raggi uscenti da O determinano una corrispondenza (biunivoca: prospettività con centro proprio) tra i punti di Π e Π’: ogni punto P di Π ha come corrispondente in Π’ la propria ombra P’.
Il meccanismo permette di sovrapporre i due piani con moto continuo, mantenendoli paralleli, evitando ogni rotazione dell’uno rispetto all’altro e conservando l’allineamento con O di ogni coppia P, P’ di punti corrispondenti (quest’ultima condizione richiede che, mentre i piani ∏ e ∏’ diminuiscono la loro distanza, anche O si sposti avvicinandosi ad essi in modo che il rapporto OP’/OP = k rimanga costante).
")
")