 |
 |
Premessa:
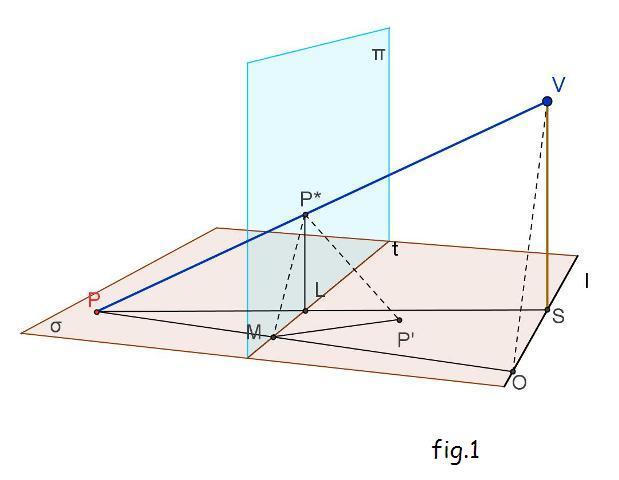
In figura 1 siano: σ e π piani prospettivi; V il punto di vista; P* l'immagine di P; t linea di terra; l retta limite; S ed L (rispettivamente) proiezioni ortogonali di V e di P’ su σ. Proiettiamo V e P* in O e M da un centro improprio con raggi paralleli a π e inclinati di 45° su σ; M ed O sono allineati con P (anche L ed S sono allineati con P). Proiettiamo P* in P’ con un raggio inclinato di 45° rispetto a σ e π (e contenuto in un piano perpendicolare a t, in modo tale che P e P’ siano da parti opposte rispetto a t (quindi LMP’ è un triangolo isoscele). La configurazione così ottenuta su σ (visibile in pianta nella figura 2) è quella realizzata da prospettografo di Lambert

Nel prospettogafo di Lambert (1° modello) due aste scanalate parallele fra loro (t ed l) sono appoggiate sul piano; S ed O sono due perni fissati sulla l; o, p r, s sono aste dotate di scanalatura rettilinea così disposte:
• s è imperniata in S e costretta a passare per L, cursore scorrevole nella t
• o è imperniata in O e costretta a passare per M, cursore scorrevole nella t
• p è fissata al cursore L in modo tale da rimanere sempre perpendicolare a t
• r è fissata ad M in modo tale da formare sempre (durante la deformazione dello strumento) un angolo di 45° con t
Preso un punto P del piano di appoggio facciamo passare per esso le scanalature s ed o: il punto P’, intersezione delle aste r e p, è l’immagine prospettica di P.
Esplora la macchina Approfondimenti
 |
 |

Nel prospettografo, il quadro è perpendicolare al piano di terra. Dal punto di vista escono due fili: il primo, perpendicolare al quadro, congiunge punto di vista e punto principale; il secondo rappresenta il raggio visivo che genera, incontrando il quadro, l’immagine prospettica P’di un punto oggetto P collocato sul piano di terra. Dal punto oggetto esce una retta perpendicolare alla linea di terra: è noto che l’ immagine prospettica di tale retta passa per il punto principale (e ovviamente per P’)
Facciamo ora ruotare il quadro attorno alla linea di terra, e contemporaneamente ruotiamo anche il punto di vista in modo che la retta che lo congiunge al punto di stazione rimanga parallela al quadro. La prospettiva P’ di P resta invariata (teorema di Stevin).
Si può in questo modo s ovrapporre il quadro al piano di terra (anche punto di vista e punto principale giaceranno allora su tale piano) in modo che P e P’ siano da parti opposte rispetto alla linea di terra. Si vede allora che P’ è intersezione di due rette appartenenti entrambe al piano di terra: quella congiungente P col punto di vista; quella congiungente il punto principale al piede della perpendicolare tracciata da P verso la linea di terra
ovrapporre il quadro al piano di terra (anche punto di vista e punto principale giaceranno allora su tale piano) in modo che P e P’ siano da parti opposte rispetto alla linea di terra. Si vede allora che P’ è intersezione di due rette appartenenti entrambe al piano di terra: quella congiungente P col punto di vista; quella congiungente il punto principale al piede della perpendicolare tracciata da P verso la linea di terra
 |
 |
Il piano del modello è diviso in due parti π (piano del disegno) e τ (piano del quadro) dalla linea t (linea di terra). Sul piano del modello l’asta r può scorrere mantenendosi sempre perpendicolare al segmento t; a e b sono due aste, imperniate al piano rispettivamente in O (punto di vista) e M (punto principale). Fissato un punto P nel semipiano π, facciamo passare per esso uno degli spigoli dell’asta r (liberamente scelto). Ruotiamo poi l’asta b in modo tale che lo spigolo passante per M intersechi quello scelto sull’asta r in un punto giacente sulla linea t. Ruotiamo infine l’asta a finché allo spigolo passante per O appartenga anche il punto P. Il punto P' intersezione degli spigoli precedentemente utilizzati delle aste b ed a è il corrispondente di P nel semipiano τ.
La principale opera prospettica di Lambert, Freye Perspektive, uscì a Zurigo nel 1774. Scopo dell'autore era quello di liberare le costruzioni prospettiche dalla necessità di tracciare le proiezioni ortogonali delle figure oggetto. Nella terza parte della Freye Perspektive, egli descrive diversi strumenti per semplificare e facilitare il disegno degli scorci: fra questi c'è anche un “pantografo deformante”, semplificazione di quello descritto negli Anlage zur Perspektive (modello Lambert 1), ma avente la medesima funzione: trascrivere automaticamente la pianta di un edificio (giardino, ...) in una prospettiva accurata.
")
")